ペットボトルもトマトもつかめるロボットハンドをミシガン大学が開発
 ロボットと聞くと、多くの人はぎこちない動きをイメージするかもしれない。しかし最近ではより滑らかで繊細な動きをこなせるものの開発が進んでいる。
ロボットと聞くと、多くの人はぎこちない動きをイメージするかもしれない。しかし最近ではより滑らかで繊細な動きをこなせるものの開発が進んでいる。
そうした取り組みの最先端例となりそうなロボットハンドを米国ミシガン州立大学が開発した。人の手のように、力加減しながら固いもの、柔らかいもの、小さいものなどを柔軟に扱える。
人間の手に近いものを
かつてのロボットハンドやロボットアームは人に代わって重いものを持ち運ぶという、どちらかというと力仕事をこなすのが主な目的だった。しかし、人がロボットの“手”を借りたいシーンは何も重いものを運ぶだけではない。
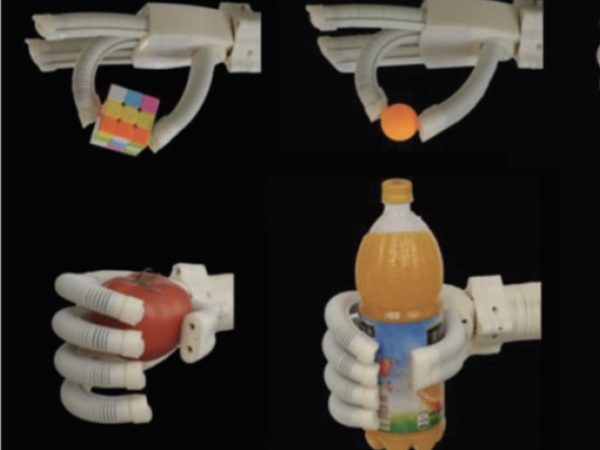
そうしたことから、ミシガン州立大学の研究チームは人間の手に近いロボットハンドの開発を手掛けてきた。今回発表したロボットハンドの最大の特徴は、物をしっかりつかむことができる一方で、壊さないようそっとつまんで持つこともできることだ。
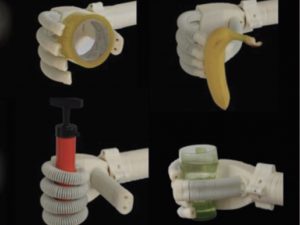
さまざまな形状にも対応し、5本の指全てを使ってペットボトルやトマトを握ったり、小さなボールを2本の指でつまんだりすることができる。
微妙な力調整ができる
こうした動きは、人間であれば経験をもとに瞬時に判断して力の加減を行う。たとえば、トマトを強い力で握ると潰してしまうことから、ペットボトルを握るときよりも優しくつかむ。
この力調整をロボットにどうさせるかが問題だが、研究チームはフレキシブルなハイブリッド空気圧式アクチュエーターを採用することで解決した。ロボットの指の中には骨の役割を果たすリーフスプリングがあり、これを空気が出入りする袋で囲んでいる構造となっている。
そしてリーフスプリングが物をつかむ力を、空気袋がソフトタッチを担当し、どちらを多く活用するかで力の調整ができる仕組みという。
研究チームは、ゆくゆくはロボットハンドで果物を摘んだり、メディカルケアを行えたりできるようにしたいと考えている。
(文・Mizoguchi)
 -海外・国内のネットベンチャー系ニュースサイト")
local_offerTechable
ウェブサイト: https://techable.jp/
- ガジェット通信編集部への情報提供はこちら
- 記事内の筆者見解は明示のない限りガジェット通信を代表するものではありません。