生物の構造をヒントにロボットを作る「Festo」、新作は巨大コウモリと転がるクモ!
 これまでもカンガルーやアリといった生物を模したロボットをいくつも開発してきたFestoが、新たに2つの生物工学ロボットを発表した。1つはコウモリ型ロボットの「フライングフォックス」で、もう1つはクモ型ロボットの「ホイールボット」だ。
これまでもカンガルーやアリといった生物を模したロボットをいくつも開発してきたFestoが、新たに2つの生物工学ロボットを発表した。1つはコウモリ型ロボットの「フライングフォックス」で、もう1つはクモ型ロボットの「ホイールボット」だ。
コウモリやクモの構造・動きからヒントを得ることで機能性を実現するこれらのロボットについて詳しく見ていこう。
・機械学習により自律して飛ぶフライングフォックス
 コウモリからインスピレーションを受けて作られたフライングフォックスは、超軽量ボディに被膜で構成された翼を持っている。ボディの長さ87cm、翼の長さ228cmとかなり大きめだが、体重はわずか580g。
コウモリからインスピレーションを受けて作られたフライングフォックスは、超軽量ボディに被膜で構成された翼を持っている。ボディの長さ87cm、翼の長さ228cmとかなり大きめだが、体重はわずか580g。
翼は、2つの気密フィルムとポリウレタン生地を約45000ポイントで溶接。この細密な構造のおかげで、翼を引っ込めたり伸ばしたりしてもほとんど形が変わらない。
また、生地のハニカム構造は、万が一フィルムに亀裂が入った際にもキズが拡がりにくくするためのものだ。これにより、翼が軽くダメージを受けても、フライングフォックスは飛行を続けられる。
飛行の最適化のために機械学習が用いられていて、飛ぶたびに少しずつ操縦が改善さていく。
自立飛行には機体の位置の推定(ローカリゼーション)が必須だが、フライングフォックスでは、カメラによるローカリゼーション機能を地上の管理システムに委ねている。おそらくシステムを外部化することで本体の軽量化を実現してるのだろう。
・転がって素早く進むホイールボット
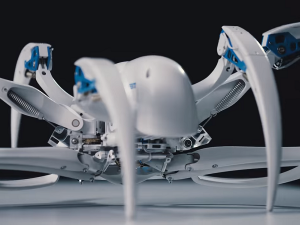 クモ型ロボット、ホイールボットのほうは、サハラ砂漠のに住んでいるフリック-フラック・スパイダーからインスピレーションを受けて作られたものだ。
クモ型ロボット、ホイールボットのほうは、サハラ砂漠のに住んでいるフリック-フラック・スパイダーからインスピレーションを受けて作られたものだ。
このクモが独特なのは、脅威が迫ったときに、転がるようにして素早く移動することだが、ホイールボットに関しても、8本の脚で歩いて移動するよりも、転がって移動する方が速い。
前に進むだけでなく方向転換をしたり、車輪型に変形したりといった脚の動きの制御のために、全部で15個の小型モーターを駆使しているとのこと。
また、転がって移動するためには現在の姿勢を常に把握しておく必要があり、これを内蔵センサーでおこない、うまく移動している。
Festoの開発するロボットはどれも見た目にも印象的で、生物を模した動きを実現するための工夫にはいつも驚かさる。次回はどんな生物工学ロボットが登場するのかが楽しみだ。
参照元:Festo’s New Bionic Robots Include Rolling Spider, Flying Fox/IEEE Spectrum
 -海外・国内のネットベンチャー系ニュースサイト")
ウェブサイト: https://techable.jp/
- ガジェット通信編集部への情報提供はこちら
- 記事内の筆者見解は明示のない限りガジェット通信を代表するものではありません。